

浙江五軸機(jī)械手如何進行更好的係統(tǒng)控製?
文(wén)章出處(chù):本站 人氣:11753 發表時間:2022-05-26 08:15:57
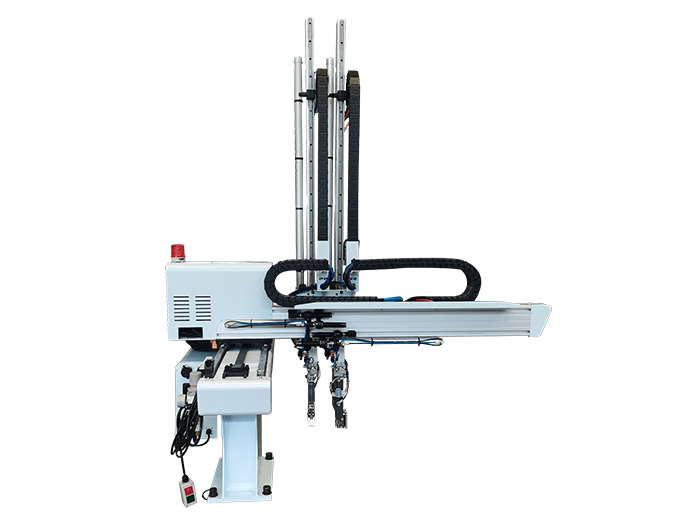
五軸機械手操作簡單容易上手,能為罐(guàn)瓶體紙筒等進行全圓周貼標,也可進行不滿全周或不滿全身的貼標,廣泛應用於食品飲料、農藥(yào)化工、油(yóu)漆塗料、醫藥保健等行業的滅蚊蠅殺蟲劑、空(kōng)氣清新劑、自噴漆、膨脹膠、丁烷氣體(tǐ)、皮革上(shàng)光劑等,對於五軸機械手(shǒu)的使用應(yīng)該如何提(tí)高效(xiào)率呢?下麵小編來帶大家了解下。
1、時刻關注模內五軸機械手的工作(zuò)狀態。
五軸機械手的的過程中工作人員應(yīng)定期檢查相關電器元件,保證(zhèng)機構(gòu)運行順暢,粉料鬥與攪拌機間的連接是否通暢,保證投料的順(shùn)暢。
2、每日機器(qì)工作(zuò)後,首先斷開電源,擦試機器表麵、工作台等部位。
3、設備需(xū)要確保使用配套(tào)的電源電壓(yā),方可正常投入生產。
4、定期檢查所有螺栓聯(lián)接的緊固(gù)程度,如發現(xiàn)鬆動應及時擰緊。
5、檢查底紙是否有損傷情況(kuàng),要求標簽供應商控製模切深度(dù),不能砍傷到底紙,並且使用格拉辛底紙。
6、檢查標簽行(háng)進過程,是否有刮傷情況,如果有要調整機構。
7、檢查貼標時候,不粘連到貼好標簽的產品,如果有需要控(kòng)製(zhì)出標長度。

如何降低(dī)五軸機械手的生產誤差
現在很多機械生產廠家,都在選擇用五軸機械手作為主要生產方式,但在生產中使用自動化機械手能夠提高產(chǎn)品的生(shēng)產效率和產品質量以(yǐ)及在降低產品的生產成本都大有提高(gāo),在生(shēng)產中五(wǔ)軸機械手能(néng)否準確地工作,實際上是(shì)一(yī)個三維空間的定位問題,是若幹線量(liàng)和角量定位的組合。在(zài)許多較簡單情況下,單個量(liàng)值可能是主要的。影響單個線量或角量定位誤差的因素如下:
1.定位方式——不同的定位方(fāng)式影響因素不同。如機械擋塊定位時,定位精度與擋塊的剛度和碰接擋塊時的速度(dù)等因素有關。
2.定位速度——定位速度對定位精度影響很大(dà)。這是因為定位速度不同時,必須耗散的運動部件(jiàn)的能量(liàng)不同。通常,為減小五軸機械手定位誤差應合理控製定(dìng)位速度,如提高緩衝裝置的緩(huǎn)衝性能和(hé)緩衝效率,控製驅動(dòng)係統使運動部(bù)件適時減速。
3.精(jīng)度——機械手的製造精度和安裝(zhuāng)調速精度對定位精度有直接影響。
4.剛度——機械(xiè)手(shǒu)本身的結構剛度和接觸剛度低時(shí),因易產生振動,定位精度一般較低。
5.運動件的重量——運動件的重量包括機械手本(běn)身的重(chóng)量和被抓物的重量。 運動(dòng)件(jiàn)重量的變化對定位精度影響較大。通常(cháng),運動件重量增加時,定位精度降(jiàng)低。因此,設計時不僅要減小運動部件本身(shēn)的重量,而且要考慮工(gōng)作時抓重變化的影響。

五軸機械手是典型的機電一體化設備,可用(yòng)於數控機床上(shàng)工(gōng)件加工(gōng),自動地為機床抓取工件,取代操作(zuò)人員頻繁取料(liào),實現工件加工自動化,節約勞動(dòng)力,節(jiē)約生(shēng)產成本,提高工作效(xiào)率。在全自動化數(shù)控加工(gōng)生產線中,零(líng)件的裝卸傳送環節一般利用工業機器人機械手完成操作,但在各種場合中都采用工業機器人(rén)不(bú)一定廣泛合(hé)適(shì)。針對具體的(de)生產工藝,結合機床的實際結構,利用數控車(chē)床(chuáng)上下料機械可以實現更簡(jiǎn)便更一體的零件裝卸傳送操作。

五軸(zhóu)機械手(shǒu)的(de)應用領域:
1.工業(yè)製造領域:
主要讓機器人在機械製造業中代替人完(wán)成大批量(liàng)、高質量要求的工作,如汽車製造、艦船製造(zào)及某些家電產品(電視機、電冰箱、洗衣機)的製造等。化工等行業自動化生產線中(zhōng)的點焊、弧焊、噴漆(qī)、切割、電子裝配及(jí)物(wù)流係統的搬運、包(bāo)裝等工作,也有部分是由機器人完(wán)成的。
2.軍(jun1)事領(lǐng)域:
主要讓機器人執行一些自動的偵察與(yǔ)控製任務,尤其是一些相對較為危險的(de)任務,比如,無人偵察機、拆除炸彈的機器人及掃雷機器(qì)人等。機器人還可以代替士兵去完成那些不太複雜的工程及後勤任務(wù),從而使(shǐ)戰士從繁重(chóng)的工作中解脫出來,去從事更加重要(yào)的工作。
3.娛樂領域:
機器人(rén)在娛樂領域的應(yīng)用十(shí)分廣(guǎng)泛,比如,機器人足球大賽、機器人彈鋼琴和機器人寵物等。
4.醫療領域:
機器人主要用來輔助護士進行一些日常的工作,比如(rú),幫助醫生運送用藥品及自動監測病房內(nèi)的空氣質量,等等。宜用(yòng)機器人還可以協助(zhù)醫生完成一(yī)些難度較高的手(shǒu)術,例如,眼部手術、腦部手術等。美國還發明了一種可以進入人(rén)體血管的微型機器人,幫助醫生在病人的血管內滅殺病(bìng)毒。
五軸機械手主(zhǔ)要由執行機構、驅(qū)動機構和控製係統三大部分組成。
那你知道它的驅動機(jī)構有那些嗎,我們來看看。他們都是有那些作用呢。
五(wǔ)軸(zhóu)機械手(shǒu)的執行機構分為(wéi)手部、手(shǒu)臂、軀幹;
3、軀幹軀幹是安裝手臂、動力源和各種執行機構(gòu)的(de)支架。
1、手部:手部安裝在手臂的前端。手(shǒu)臂的內孔中裝有傳動軸,可把運用傳給手腕,以轉(zhuǎn)動、伸曲手腕、開閉手指(zhǐ)。
五軸機械(xiè)手手部的構造係模仿(fǎng)人的手指,分為無(wú)關節、固定關節(jiē)和自由關節3種。手指的數量又可(kě)分為二指、三指、四指等,其中以(yǐ)二指用的最多。
可(kě)根據夾持對象的形狀和大小配備多(duō)種形(xíng)狀和大(dà)小的夾頭以(yǐ)適應(yīng)操作的需要。所謂沒有手指的手部,一般都是指真空吸盤或磁性(xìng)吸(xī)盤。
2、手臂(bì):手臂的作(zuò)用是引(yǐn)導手指準確地抓(zhuā)住工件(jiàn),並運送(sòng)到所需的位(wèi)置上。
為了使五軸機械手(shǒu)能夠正確地工作,手臂的3個自由度都要精確地定位。
五軸機械手控製的要素包(bāo)括工作順序、到達位置、動作時間、運動速度、加減速度等。五(wǔ)軸機械手的控製分為點位控製和連續軌跡控(kòng)製兩種。
控製(zhì)係統可根據動作的要求,五軸機械手(shǒu)設計采用數字(zì)順序控製。它首先要編製程序加以存儲,然後再根據規定的程序,控製五軸機械手進行工作程(chéng)序的存儲方式有分離存儲和集(jí)中存儲兩種。
分離存儲是將各種控製因素的信息(xī)分別存儲於兩種以上的存儲裝置中(zhōng),如順(shùn)序信息存儲於插(chā)銷(xiāo)板(bǎn)、凸輪轉鼓、穿孔(kǒng)帶內;位置信息存儲於時間繼電器、定速回轉鼓等;集中存儲是將各種(zhǒng)控製因(yīn)素的信息(xī)全部存儲(chǔ)於一種存儲裝置內,如磁帶、磁鼓(gǔ)等。
這種方式使用於順序、位置、時間、速度等必須同時控製的場合,即(jí)連(lián)續控製(zhì)的情況下使(shǐ)用。




